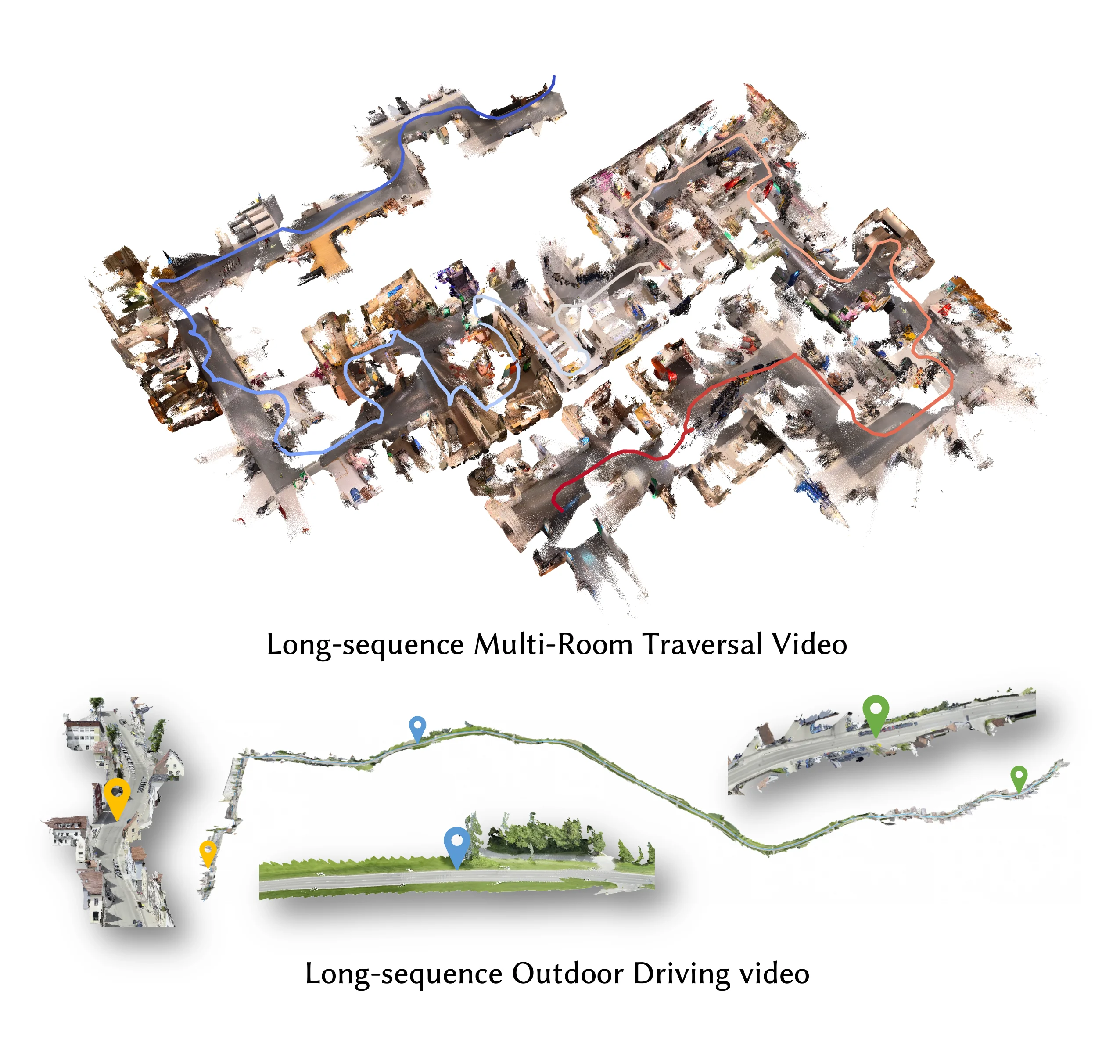
你是否想过,让一台移动的无人机或扫地机器人,在飞行或行走过程中,无需后处理、不依赖SLAM迭代优化,就能实时生成厘米级精度的三维场景地图?LingBot-Map正是这样一款革命性的开源工具——它不是传统SLAM系统,而是一个专为“流式数据”设计的前馈式(feed-forward)3D基础模型,能直接将连续采集的RGB-D或激光点云视频流,一步转化为结构完整、几何一致、长期稳定的三维语义地图。
核心功能
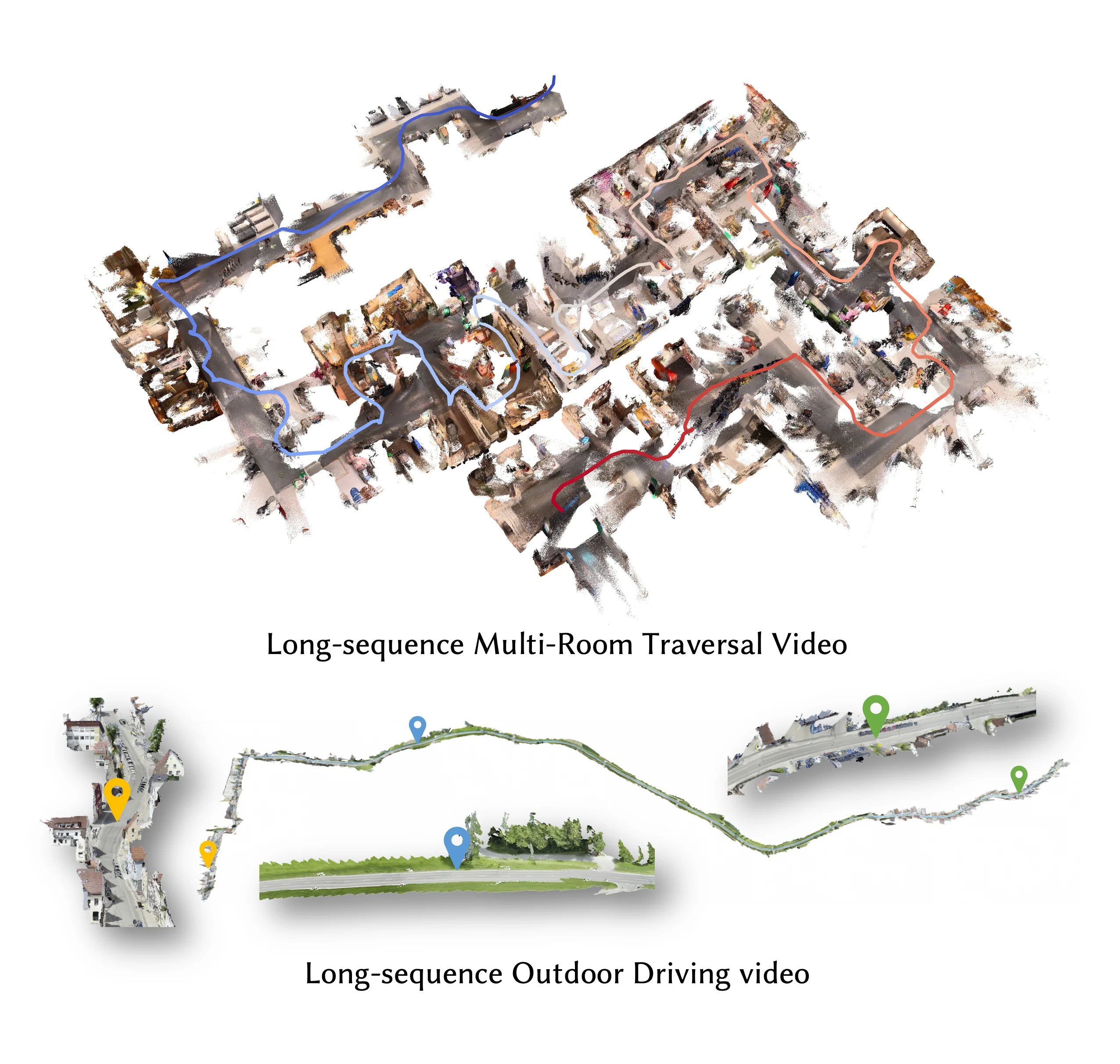
- 真正实时的流式重建:摒弃传统SLAM的循环优化与回环检测,采用纯前馈推理架构,输入即输出,延迟低于200ms,适合嵌入式设备与边缘部署。
- 几何上下文Transformer:首创“锚点上下文+位姿参考窗口+轨迹记忆”三合一架构,同时建模空间坐标、稠密几何特征与长时漂移补偿,大幅提升跨帧一致性。
- 多源传感器友好:原生支持RGB-D相机、LiDAR点云序列及融合输入,提供统一接口,无需手动标定或预对齐。
- 开箱即用的预训练模型:已在ScanNet、KITTI、ARKitScenes等大规模真实场景上预训练,Hugging Face与ModelScope双平台一键加载,支持中文社区无缝接入。
- 轻量可裁剪设计:模型支持动态分辨率缩放与通道剪枝,可在Jetson AGX Orin、树莓派5+AI加速模块等低功耗平台上流畅运行。
- 开放可扩展的地图API:输出标准TSDF体素网格+语义标签+拓扑连通图,支持ROS2、Unity、Three.js等主流生态直接调用与可视化。
适合哪些人用
如果你是以下角色,LingBot-Map将极大提升你的开发效率与项目上限:
• 机器人/自动驾驶工程师:快速构建室内导航地图、仓库巡检三维底图或无人车局部高精建图模块;
• AR/VR开发者:为移动端AR应用提供毫秒级环境理解能力,实现真实物体遮挡与空间锚定;
• 科研人员与高校师生:作为3D视觉、具身智能、神经辐射场(NeRF)等方向的新基线模型,支持消融实验与算法对比;
• 教育创客与爱好者:搭配Realsense D435或Livox Mid-360等消费级传感器,30分钟搭建属于自己的实时建图小车。
快速上手
只需三步即可体验:
- 安装依赖:
pip install lingbot-map torch torchvision(支持CUDA 11.8+/PyTorch 2.3+) - 加载预训练模型:
from lingbot_map import LingBotMap; model = LingBotMap.from_pretrained("robbyant/lingbot-map") - 实时推理示例:
map_tensor = model.process_stream(video_stream, fps=15, resolution="640x480"),输出即为可渲染的TSDF体素张量。
详细教程、Jupyter Notebook演示与ROS2驱动包已集成在GitHub仓库的examples/目录中,中文文档同步更新于项目官网:technology.robbyant.com/lingbot-map。
项目信息
Robbyant/lingbot-map
GitHub
A feed-forward 3D foundation model for reconstructing scenes from streaming data
编程语言:Python|GitHub Star 数:8001|开源协议:Apache-2.0|GitHub 项目地址
这是目前中文社区最易用、最贴近工业落地需求的实时3D建图基础模型——不玩概念,只做实事,让三维感知真正走进每一台移动终端。