NVIDIA Cosmos 是英伟达推出的全新开源平台,专为构建“物理人工智能(Physical AI)”而生——它不是聊天机器人,而是能让机器真正理解物理世界、感知环境变化、预测物体运动、并做出空间决策的下一代AI基础设施。它整合了世界模型(World Models)、多模态仿真数据集和高性能推理工具链,帮助开发者为机器人、自动驾驶汽车、智能交通系统、数字孪生城市等真实物理场景打造具备空间认知能力的智能体。
核心功能
- 开箱即用的世界模型家族:提供 Cosmos-3 系列预训练模型,支持视频生成、3D场景重建、跨模态时空推理,可直接作为物理世界的“数字镜像”使用。
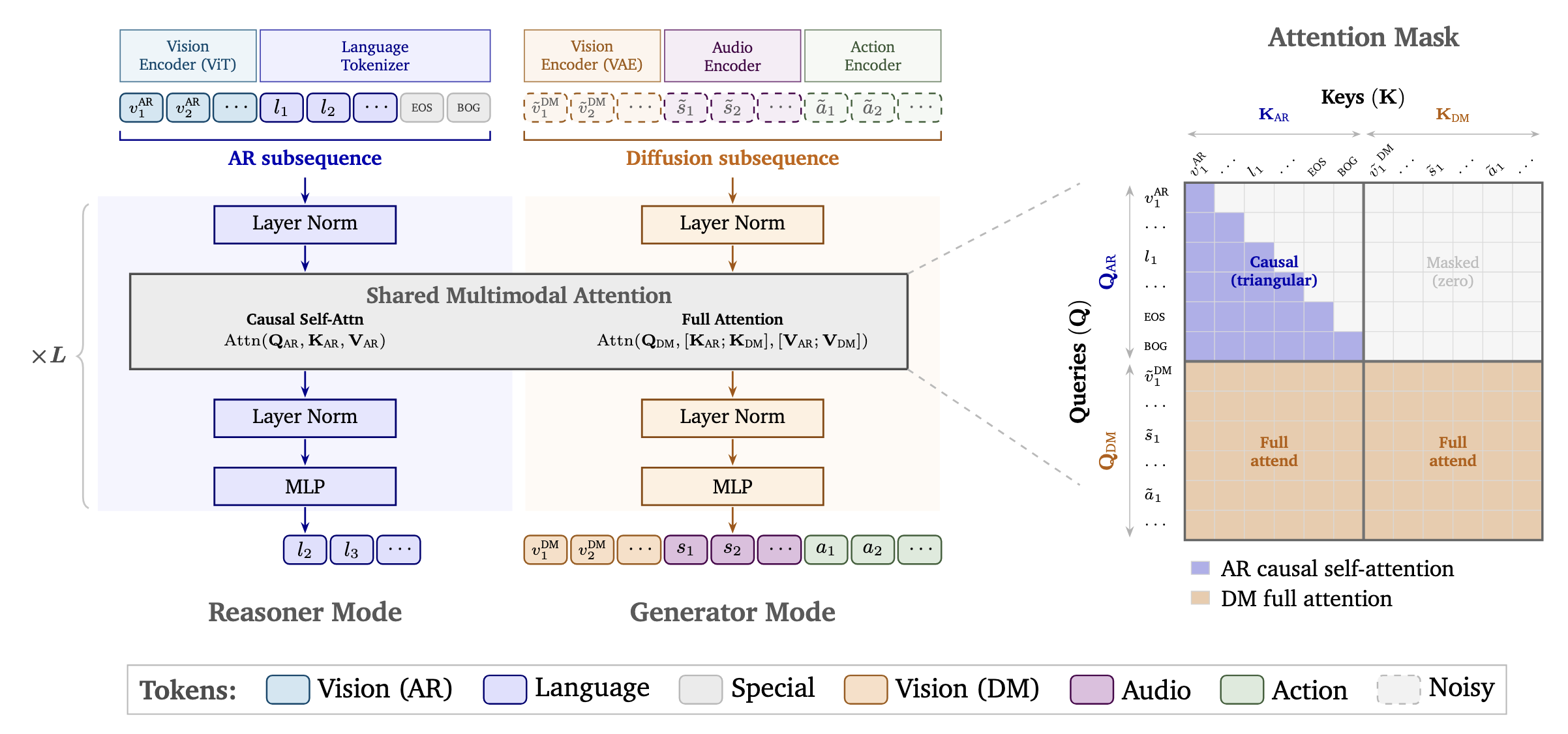
- 端到端生成与推理双模式:既可作为Generator(生成器),根据文本/图像输入合成高保真动态视频;也可作为Reasoner(推理器),对物理场景进行因果推断、动作规划与风险预测。
- 工业级部署友好架构:原生支持 Diffusers、vLLM-Omni、Transformers、vLLM 及 NVIDIA NIM(NVIDIA Inference Microservices)等多种主流推理后端,轻松适配云、边、端不同算力环境。
- 面向真实物理场景的数据集:配套发布涵盖室内导航、车辆交互、机械臂操作等任务的高质量仿真-真实对齐数据集,显著降低物理AI模型训练门槛。
- 模块化工具链集成:提供标准化数据加载器、时空对齐评估指标、可视化调试界面(Jupyter Notebook 交互式示例丰富),大幅缩短从原型到落地的周期。
- 全栈可控的开源生态:框架层(cosmos-framework)、模型权重、训练脚本、推理示例全部开源,不依赖闭源服务,保障科研与商用的长期可控性。
适合哪些人用
如果你是以下角色,Cosmos 将成为你开发物理AI应用的关键加速器:
• 机器人算法工程师:需要为移动底盘、机械臂或具身智能体构建环境建模与行为规划能力;
• 自动驾驶感知/预测团队:希望引入世界模型提升轨迹预测、长尾场景泛化与安全验证效率;
• 智慧城市与数字孪生开发者:需构建可交互、可推演的城市级动态仿真系统;
• 高校与研究所研究者:从事具身AI、视觉-语言-动作联合建模、神经辐射场(NeRF)与世界模型交叉方向;
• 边缘AI硬件厂商:寻求在Jetson Orin、IGX等平台高效部署物理感知模型的参考方案。
快速上手
无需从零训练,5分钟启动体验:
- 安装依赖:
pip install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu121(推荐 CUDA 12.1) - 克隆项目:
git clone https://github.com/NVIDIA/cosmos.git && cd cosmos - 运行生成示例(需显卡):
python examples/generator/diffusers_quickstart.py --prompt "a robot arm picking up a red cup" - 运行推理示例:
python examples/reasoner/vllm_quickstart.py --video_path ./sample.mp4 --question "What will happen next?" - 所有 Jupyter Notebook 教程(含数据加载、微调、量化部署)均位于
notebooks/目录,开箱即学。
项目信息
NVIDIA Cosmos is an open platform of world models, datasets, and tools that enables developers to build Physical AI for robots, autonomous vehicles, s
8.8k
今日 +138 stars today
Stars
570
Forks
Jupyter Notebook
NOASSERTION
编程语言:Jupyter Notebook(核心逻辑基于 Python + PyTorch)
GitHub Star 数:8776(持续快速增长中)
开源协议:未明确声明(NOASSERTION),但官方明确表示“完全开源可用”,所有模型与代码均开放下载与商用
GitHub 项目地址
如果你正为机器人“看不懂门怎么开”、自动驾驶“想不通为什么行人会突然冲出”而苦恼——Cosmos 不是一套玩具Demo,而是英伟达交到开发者手中的第一把物理世界钥匙。